Hoe maak je een beveiligingsalarm met PIR-sensor en Arduino?
Straatcriminaliteit is in de moderne eeuw heel gebruikelijk. Iedereen moet zich veilig voelen als hij of zij thuis is, of hij nu 's nachts of overdag slaapt. Er zijn dus veel beveiligingsalarmsystemen op de markt. Deze systemen zijn zeer efficiënt maar kostbaar. EEN inbreker alarm of een inbraakalarm is in feite een elektronisch apparaat dat een alarm laat afgaan wanneer het een indringer in huis detecteert. We kunnen thuis een inbraakalarmcircuit maken dat bijna even efficiënt is voor een bepaald bereik van afstand en zeer goedkoop zal zijn.
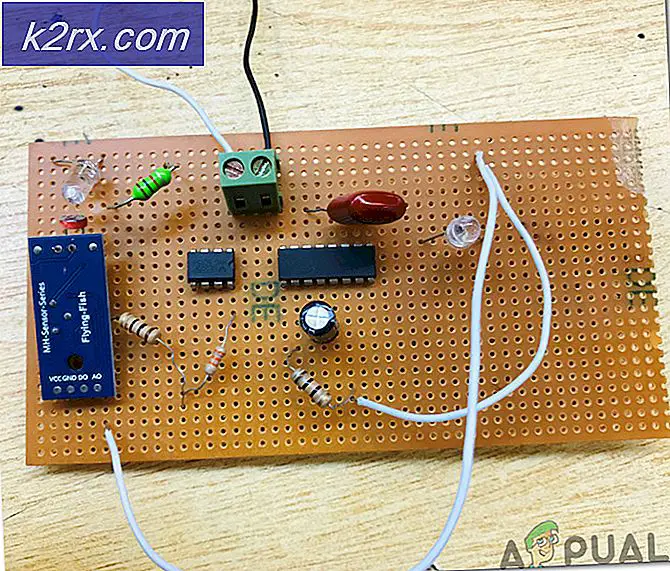
Dit artikel gaat over het maken van een inbraakalarm met behulp van Arduino en PIR-sensor. Wanneer de PIR-sensor een indringer detecteert, stuurt deze een signaal naar Arduino en geeft de Arduino een alarmsignaal. Dit circuit is heel eenvoudig en wordt ontworpen op een Veroboard. Dit Veroboard zal worden geïnstalleerd op die plaats van het huis waar meer gevaar bestaat dat een indringer het huis binnendringt.
Hoe ontwerp je een op PIR-sensor gebaseerd inbraakalarm?
De beste benadering om een project te starten, is door een lijst met componenten te maken en deze componenten kort te bestuderen, omdat niemand midden in een project wil blijven staan alleen omdat er een component ontbreekt. Laten we een lijst met componenten maken, ze aanschaffen en aan de slag gaan met het project. Het Vero-bord heeft de voorkeur voor het monteren van het circuit op hardware, want als we de componenten op het breadboard monteren, kunnen ze ervan loskomen en zal het circuit kort worden, dus Veroboard heeft de voorkeur.
Stap 1: Verzamelen van de componenten (hardware)
Stap 2: Benodigde componenten (software)
Na het downloaden van de Proteus 8 Professional, ontwerp je het circuit erop. Ik heb hier softwaresimulaties opgenomen, zodat het voor beginners handig kan zijn om het circuit te ontwerpen en de juiste aansluitingen op de hardware te maken.
Stap 3: werking van het circuit
De werking van dit circuit is heel eenvoudig. In eerste instantie wordt de status van de PIR-sensor ingesteld op LAAG. het betekent dat er geen beweging wordt gedetecteerd. Wanneer een beweging wordt gedetecteerd door de PIR-sensor, stuurt deze een signaal naar de microcontroller. De microcontroller zal dan de zoemer en LED inschakelen. Als er geen beweging wordt gedetecteerd, blijven de LED en zoemer uitgeschakeld.
Stap 4: De componenten monteren
Nu we de belangrijkste verbindingen kennen en ook het volledige circuit van ons project, laten we doorgaan en beginnen met het maken van de hardware van ons project. Een ding moet in gedachten worden gehouden: het circuit moet compact zijn en de componenten moeten zo dicht bij elkaar worden geplaatst.
- Neem een Veroboard en wrijf de zijkant met de koperen coating in met een schraappapier.
- Plaats nu de componenten zorgvuldig en voldoende dichtbij zodat de omvang van het circuit niet erg groot wordt
- Neem twee stuks Female headers en plaats deze zo op het Veroboard dat de onderlinge afstand gelijk moet zijn aan de breedte van het Arduino nano board. We zullen later het Arduino nano-bord in deze vrouwelijke headers monteren.
- Maak de verbindingen voorzichtig met soldeerbout. Als er een fout wordt gemaakt tijdens het maken van de verbindingen, probeer dan de verbinding te desolderen en de verbinding opnieuw goed te solderen, maar uiteindelijk moet de verbinding goed vastzitten.
- Voer een continuïteitstest uit nadat alle aansluitingen zijn gemaakt. In de elektronica is de continuïteitstest het controleren van een elektrisch circuit om te controleren of er stroom vloeit in het gewenste pad (dat het zeker een totaalcircuit is). Een continuïteitstest wordt uitgevoerd door een kleine spanning in te stellen (bedraad in opstelling met een LED of een onderdeel dat commotie veroorzaakt, bijvoorbeeld een piëzo-elektrische luidspreker) over de gekozen weg.
- Als de continuïteitstest slaagt, betekent dit dat het circuit naar behoren is gemaakt zoals gewenst. Het is nu klaar om te worden getest.
- Verbind de batterij met het circuit.
Controleer nu alle verbindingen door naar het onderstaande schakelschema te kijken:
Stap 5: Aan de slag met Arduino
Als u nog niet bekend bent met de Arduino IDE, hoeft u zich geen zorgen te maken, want hieronder wordt een stapsgewijze procedure voor het instellen en gebruiken van de Arduino IDE met een microcontrollerbord uitgelegd.
- Download de nieuwste versie van Arduino IDE van Arduino.
- Sluit je Arduino Nano-bord aan op je laptop en open het configuratiescherm. klik in het configuratiescherm opHardware en geluid. Klik nu opApparaten en printers.Zoek hier de poort waarop uw microcontroller-kaart is aangesloten. In mijn geval wel COM14maar het is anders op verschillende computers.
- Klik op het menu Tool. en zet het bord op Arduino Nano uit het vervolgkeuzemenu.
- Stel in hetzelfde Tool-menu de poort in op het poortnummer dat u eerder in het Apparaten en printers.
- Stel in hetzelfde toolmenu de processor in op ATmega328P (oude bootloader).
- Download de onderstaande code en plak deze in uw Arduino IDE. Klik op de uploaden knop om de code op uw microcontroller-bord te branden.
Klik hier om de code te downloaden.
Stap 6: De code begrijpen
De code van dit project is vrij goed becommentarieerd en zeer gemakkelijk te begrijpen. Maar toch wordt het hieronder kort uitgelegd.
1. Bij de start worden de pinnen van de Arduino geïnitialiseerd die later worden verbonden met de LED en de zoemer. Er wordt ook een variabele gedeclareerd die enkele waarden tijdens runtime opslaat. Vervolgens wordt de begintoestand van de PIR ingesteld op LAAG, wat betekent dat er wordt verteld dat er aanvankelijk geen beweging wordt gedetecteerd.
int ledPin = 5; // kies de pin voor de LED int Buzzer = 6; // kies de pin voor de Buzzer int inputPin = 2; // kies de invoerpin (voor PIR-sensor) int pirState = LOW; // we beginnen, ervan uitgaande dat er geen beweging wordt gedetecteerd int val = 0; // variabele voor het lezen en opslaan van de pin-status voor verder gebruik
2. leegte setup ()is een functie waarin we de pinnen van het Arduino-bord initialiseren om te worden gebruikt als INPUT of OUTPUT. De baudrate wordt ook in deze functie ingesteld. De baudrate is de bits per seconde waarmee de microcontroller met de externe apparaten communiceert.
void setup () {pinMode (ledPin, OUTPUT); // verklaar LED als output pinMode (Buzzer, OUTPUT); // verklaar Buzzer als output pinMode (inputPin, INPUT); // verklaar sensor als invoer Serial.begin (9600); // stel baudrate gelijk aan 9600}3. leegte lus ()is een functie die keer op keer in een lus wordt uitgevoerd. In deze functie is de microcontroller zo geprogrammeerd dat als hij beweging detecteert, hij een signaal naar de zoemer en LED stuurt en deze inschakelt. Als de beweging niet wordt gedetecteerd, zal deze niets doen.
void loop () {val = digitalRead (inputPin); // lees invoerwaarde van de PIR-sensor if (val == HIGH) // Als beweging wordt gedetecteerd vóór {digitalWrite (ledPin, HIGH); // zet LED AAN digitalWrite (Buzzer, 1); // zet zoemer AAN vertraging (5000); // creëer een vertraging van vijf seconden if (pirState == LOW) {// als de status aanvankelijk laag is, betekent dit dat er geen beweging is gedetecteerd // we hebben zojuist Serial.println ingeschakeld ("Beweging gedetecteerd!"); // Druk op een seriële monitor af dat de beweging wordt gedetecteerd pirState = HIGH; // pirState is ingesteld op HIGH}} else {digitalWrite (ledPin, LOW); // zet LED UIT digitalWrite (Buzzer, 0); // zet zoemer UIT if (pirState == HIGH) {// als de status aanvankelijk HOOG is, betekent dat er eerder beweging werd gedetecteerd // we hebben zojuist Serial.println uitgeschakeld ("Beweging beëindigd!"); // Druk op seriële monitor af dat de beweging het einde heeft pirState = LOW; // pirState is ingesteld op LOW}}}Dit was dus de hele procedure om thuis een beveiligingsalarmcircuit te maken met behulp van een PIR-sensor. U kunt nu aan het werk gaan en uw eigen goedkope en efficiënte beveiligingsalarm maken.